Motion Coordination for Multi-Robot Systems
Description
Planning is a crucial component in robotic systems. Nevertheless, the state-of-the art algorithms do not perform well in realistic conditions for robot groups. On the one hand, sampling or graph based methods which operate in joint space suffer from the dimensionality explosion. On the other hand, planners which try to avoid that effect make simplifying assumptions, limiting its practical applications.
We investigate planning algorithms which work in realistic conditions (that is kinematic constraints and imperfect plan execution) for robot groups. Because there is always the possibility that a single robot fails, such plans need to be either be computable in a very short amount of time or it needs to be possible to update them online.
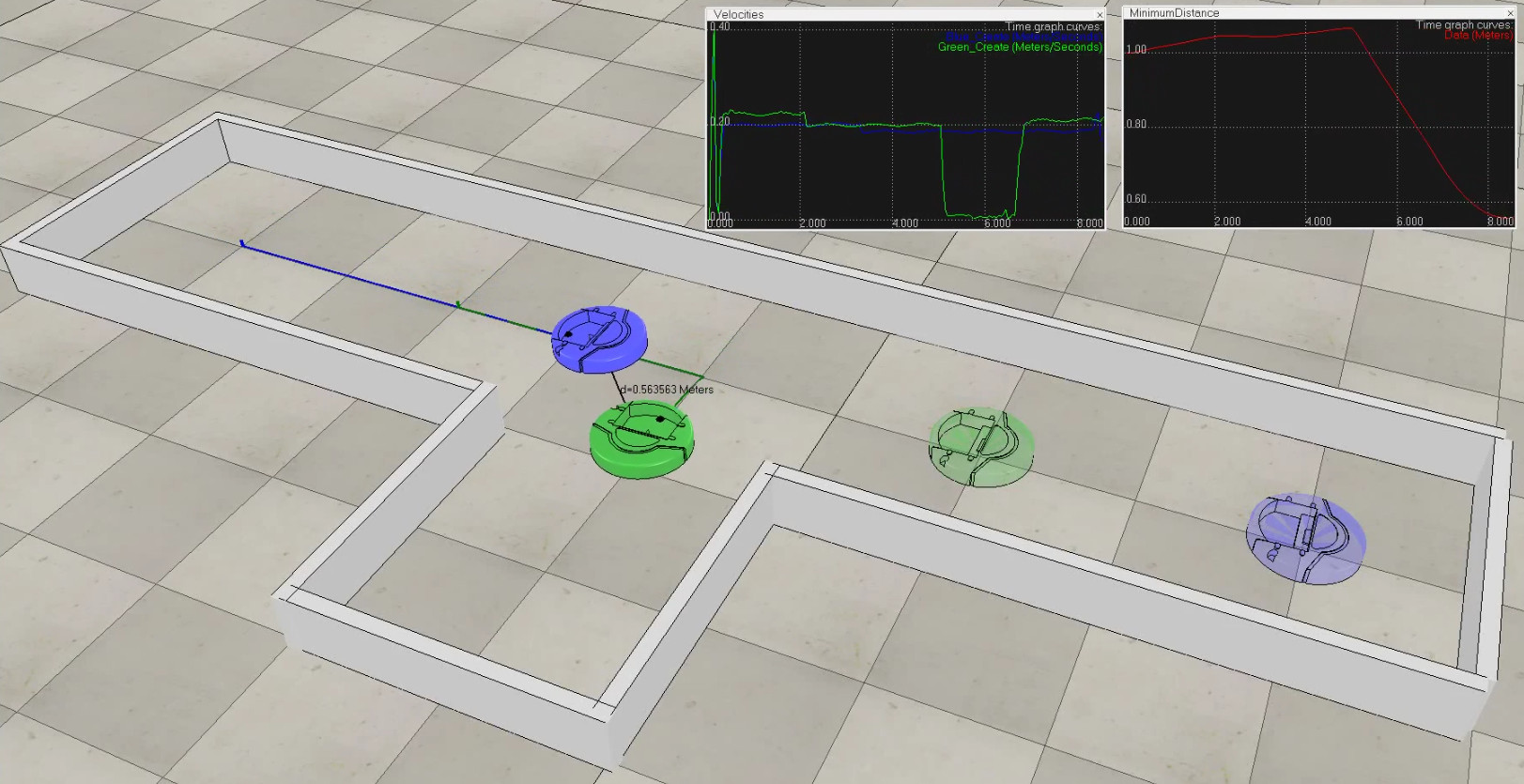
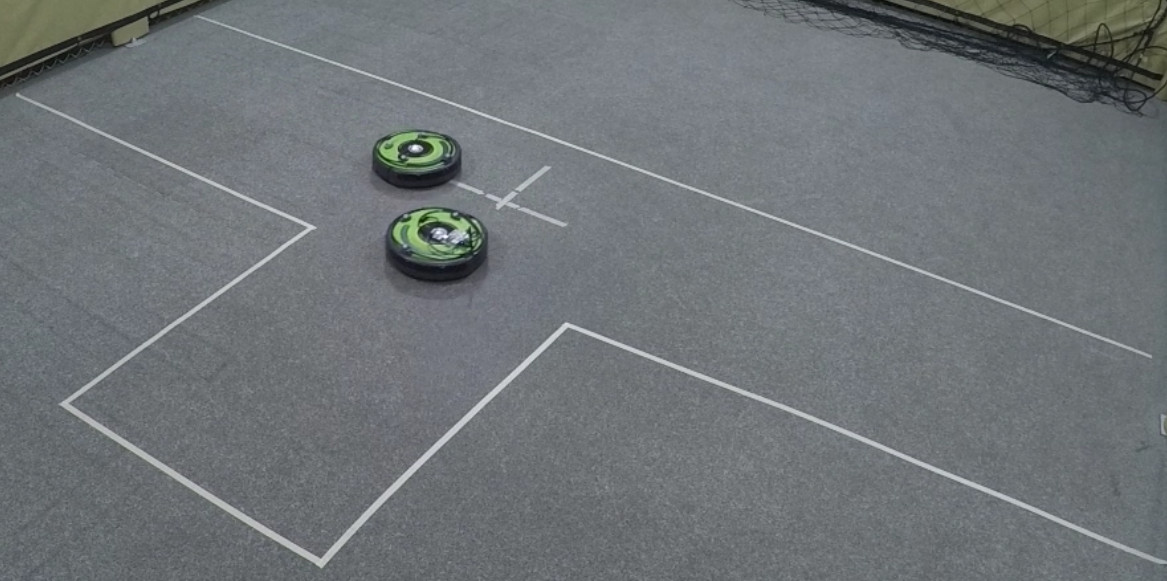
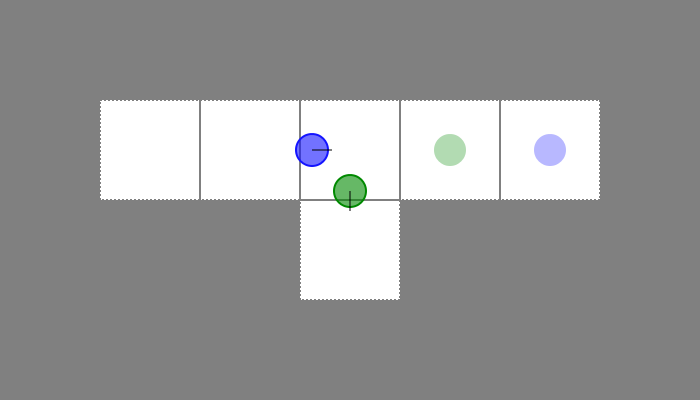
The following video shows an example of a motion planning problem. The robots need to swap sides, but there is only a small corridor available. Nevertheless, we want to find a motion plan for each robot such that the overal swapping time is minimal (or within a specifiable factor away from the optimum).
Investigators
In collaboration with the Intelligent Decision Making Laboratory (IDM Lab).
- Wolfgang Hönig
- B. Şenbaşlar
- M. Debord
- T. K. Satish Kumar
- Liron Cohen (IDM Lab)
- Hang Ma (IDM Lab)
- Hong Xu (IDM Lab)
- Sven Koenig (IDM Lab)
- Nora Ayanian
Funding
This project is supported by NSF IIS-1724392 and NSF CNS-1837779.Related Publications
-
W. Hönig, S. Kiesel, A. Tinka, J. W. Durham,, and N. Ayanian.
"Persistent and Robust Execution of MAPF Schedules in Warehouses",
in IEEE Robotics and Automation Letters (RA-L), Accepted, To Appear, 2019.
[ PDF Preprint, Video, DOI ] -
B. Şenbaşlar, W. Hönig, and N. Ayanian.
"Robust Trajectory Execution for Multi-Robot Teams Using Distributed Real-time Replanning (Extended Abstract)",
in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (Poster), Madrid, Spain, October 2018.
[ PDF Preprint, Video ] -
B. Şenbaşlar, W. Hönig, and N. Ayanian.
"Robust Trajectory Execution for Multi-Robot Teams Using Distributed Real-time Replanning",
in Int. Symp. on Distributed Autonomous Robotic Systems (DARS), Boulder, CO, USA, October 2018.
[ PDF Preprint, Video ] -
W. Hönig, J. A. Preiss, T. K. S. Kumar, G. S. Sukhatme, and N. Ayanian.
"Trajectory Planning for Quadrotor Swarms",
in IEEE Transactions on Robotics (T-RO), Special Issue Aerial Swarm Robotics, vol. 34, no. 4, pp. 856-869, August 2018.
[ PDF Preprint, Video, DOI ] -
M. Debord, W. Hönig, and N. Ayanian.
"Trajectory Planning for Heterogeneous Robot Teams",
in Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, October 2018.
[ PDF Preprint, Video, Blog Post ] -
W. Hönig, S. Kiesel, A. Tinka, J. W. Durham, and N. Ayanian.
"Conflict-Based Search with Optimal Task Assignment",
In Proc. of the 17th International Conference on Autonomous Agents and Multiagent Systems (AAMAS), Stockholm, Sweden, July 2018.
[ PDF Preprint, ACM, DBLP ] -
J. A. Preiss, W. Hönig, G. S. Sukhatme, and N. Ayanian.
"Downwash-Aware Trajectory Planning for Large Quadrotor Teams",
in Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, September 2017.
[ PDF Preprint, Video, DOI, DBLP ] -
H. Ma, W. Hönig, L. Cohen, T. Uras, H. Xu, T. K. S. Kumar, N. Ayanian and S. Koenig.
"Overview: A Hierarchical Framework for Plan Generation and Execution in Multirobot Systems",
in IEEE Intelligent Systems, vol. 32, no. 6, pp. 6-12, November/December 2017.
[ PDF Preprint, Video, DOI, DBLP ] -
W. Hönig, T. K. S. Kumar, L. Cohen, H. Ma, H. Xu, N. Ayanian, and S. Koenig.
"Summary: Multi-Agent Path Finding with Kinematic Contraints",
in International Joint Conferences on Artificial Intelligence, Melbourne, Australia, August 2017.
[ PDF, Video, DBLP ] -
W. Hönig, T. K. S. Kumar, H. Ma, S. Koenig, and N. Ayanian
"Formation change for robot groups in occluded environments",
in Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, October 2016.
[ PDF Preprint, Video, BibTeX ] -
H. Ma, S. Koenig, N. Ayanian, L. Cohen, W. Hönig, T. K. S. Kumar, T. Uras, H. Xu, C. Tovey, and G. Sharon.
"Overview: Generalizations of Multi-Agent Path Finding to Real-World Scenarios",
in IJCAI-16 Workshop on Multi-Agent Path Finding (WOMPF), New York City, NY, July 2016.
[ PDF Preprint ] -
W. Hönig, T. K. S. Kumar, L. Cohen, H. Ma, S. Koenig, and N. Ayanian.
"Path Planning With Kinematic Constraints For Robot Groups",
in Southern California Robotics Symposium (SCR), San Diego, CA, April 2016.
[ PDF Preprint ] -
W. Hönig, T. K. S. Kumar, L. Cohen, H. Ma, H. Xu, N. Ayanian, and S. Koenig.
"Multi-Agent Path Finding with Kinematic Contraints",
in International Conference on Automated Planning and Scheduling, London, U.K., June 2016.
AWARDED BEST PAPER IN ROBOTICS TRACK.
[ PDF Preprint, Video, BibTeX ]