ACTBot
Description
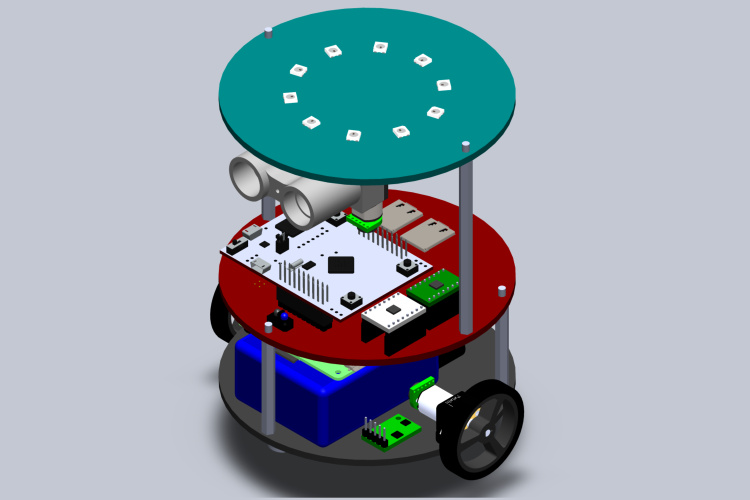
Development of a differential-drive robot platform. The platform was successfuly created and is now in the software development and testing phase. We intend to create a public repository and plan on making both the hardware and software design files freely available in the near future.
Investigators
- Luis Servín
- Jacob Swanson
- Lindsay White
- Vishwa Theja
- Arash Tavakoli
- Nora Ayanian