Mapping with Heterogeneous Robots
Description
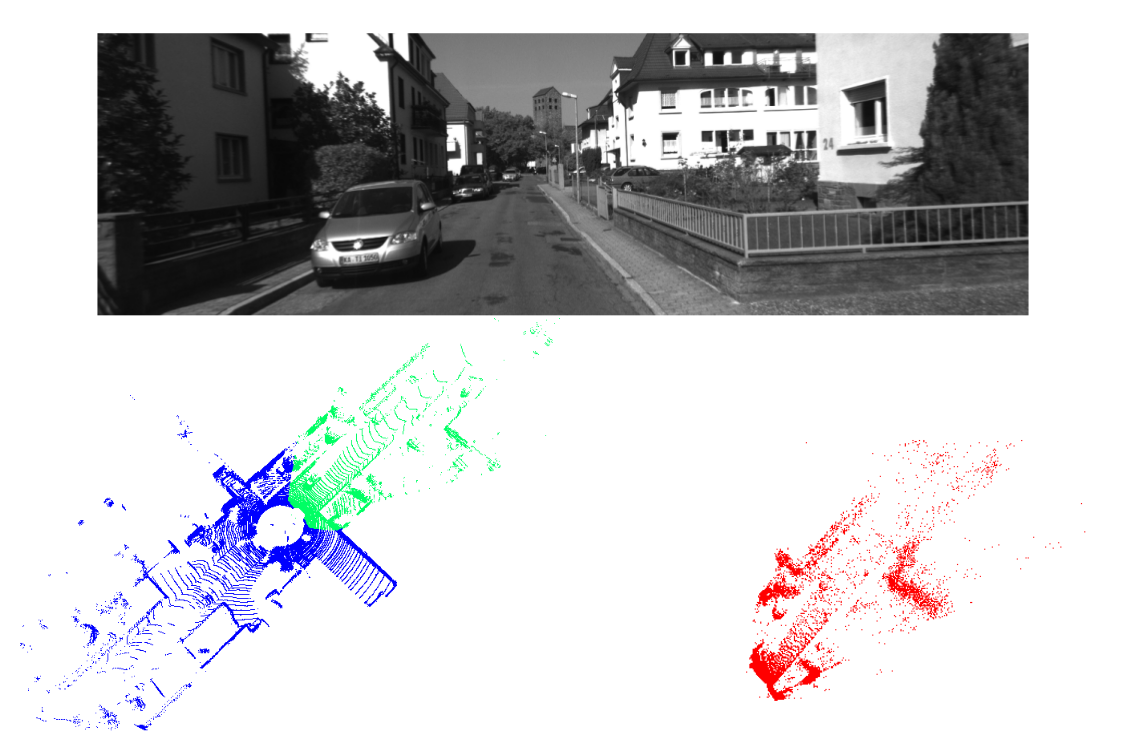
When robots operate in unknown environments like search and rescue or planetary exploration by rovers, it is important for them to build a map that can be used for localization, planning, and identifying science or search targets. Heterogeneous robots with different kinds of sensors are beneficial for exploration because they have different capabilities and may be able to search the area in different ways. However, it is extremely challenging to combine these measurements from different kinds of sensors.
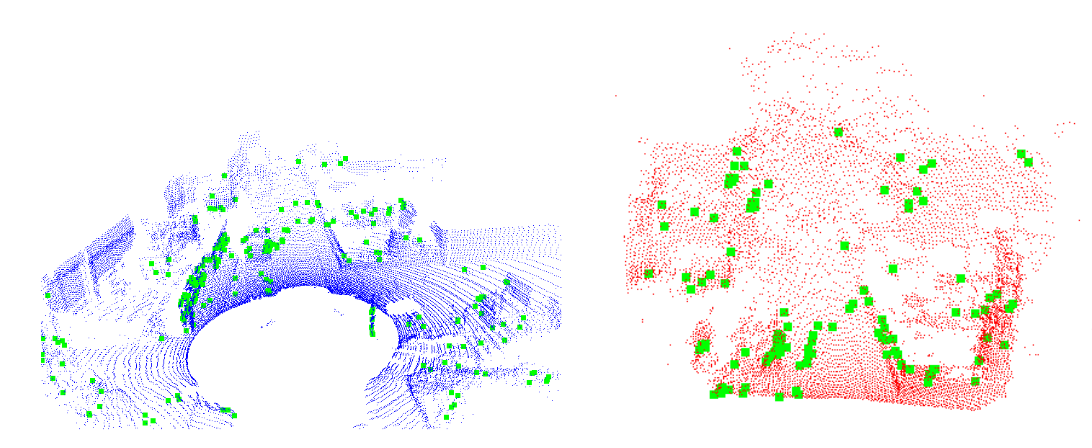
This project focuses on combining data from different kinds of sensors to build better maps, and on building maps that can be used by robots with different capabilities. Initially, we have focused on finding ways to represent information which is shared between different kinds of measurements, such as features which appear in point clouds created from different types of sensors, like LIDAR and stereo camera. We plan to do multi-robot SLAM and build maps with these features. We also plan additional work on improving map-building in groups of heterogeneous robots.
Investigators
- Elizabeth Boroson
- Nora Ayanian
Funding
Elizabeth Boroson is funded by the NASA Space Technology Research Fellowship.Related Publications
-
E.R. Boroson, R. Hewitt, N. Ayanian, and J.-P. de la Croix.
"Inter-Robot Range Measurements in Pose Graph Optimization",
in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), October 2020.
-
E.R. Boroson and N. Ayanian.
"3D Keypoint Repeatability for Heterogeneous Multi-Robot SLAM",
in IEEE International Conference on Robotics and Automation (ICRA), Montréal, Canada, May 2019.
[ PDF Preprint ]