Long-Duration Deployments of Heterogeneous Teams of Robots


Description
Many tasks require robots to operate in long-duration missions with minimal interruption for recharging or replenishing resources. However, robot power and resources are limited, and without a continuous supply of these resources, robots would have significant downtime for recharging or refreshing other resources, which could be severely disruptive to their mission.
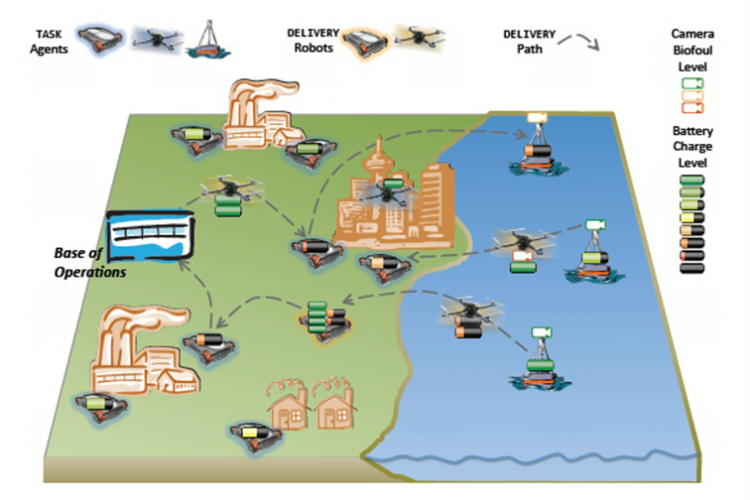
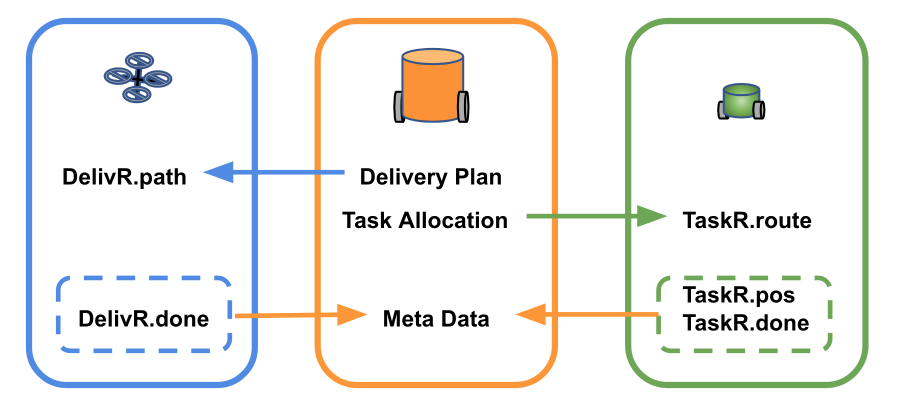
In this project, we are developing a theoretical framework to deploy teams of robots (task robots) for exploration and surveillance while taking into account their energy and resource requirements. We envision a distribution center with replenishable resources (batteries, cameras etc.) that receives or predicts requests for fresh resources from deployed robots, and dispatches agile delivery robots (e.g., quadrotors) to deliver them in a timely manner.
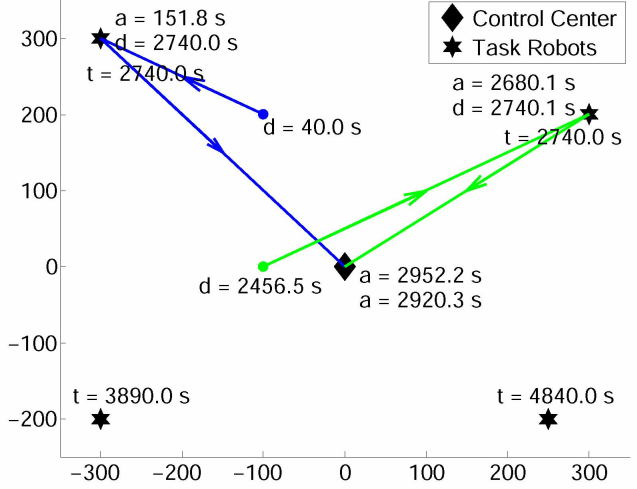
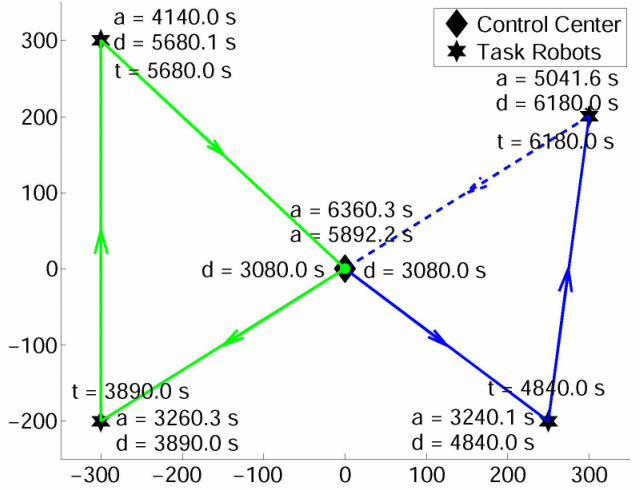
We will address the scheduling and prediction problem underlying this distribution task and propose solutions which generate near-optimal schedules for resource redistribution with multiple incoming requests from deployed robots. The framework will incorporate priorities on task robots which can be changed over time, and allow a relaxed delivery schedule if there are not enough delivery robots available. Delivery robots can also be dynamically re-routed to make efficient use of time and resources to sustain long-duration missions for robotic teams operating in a given region.
Investigators
- Jingyao Ren
- Nitin Kamra
- Ameer Hamza
- Nora Ayanian
Related Publications
-
N. Kamra, T. K. S. Kumar and N. Ayanian.
"Combinatorial Problems in Multirobot Battery Exchange Systems",
in IEEE Trans. Automation Science and Engineering, vol. 15, no. 2, pp. 852-862, April 2018.
[ PDF Preprint, DOI, DBLP ] -
A. Hamza.
"Predicting mission power requirement for mobile robots" (Master’s Thesis).
Viterbi School of Engineering, University of Southern California, 2015.
[ Full Thesis ] -
N. Kamra and N. Ayanian.
“A Mixed Integer Programming Model for Timed Deliveries in Multirobot Systems”,
in IEEE Conf. on Automation Science and Engineering, Gothenburg, Sweden, August 2015.
[ PDF Preprint, BibTeX ]